1.5.3 ROS计算图
1.计算图简介
前面介绍的是ROS文件结构,是磁盘上 ROS 程序的存储结构,是静态的,而 ros 程序运行之后,不同的节点之间是错综复杂的,ROS 中提供了一个实用的工具:rqt_graph。
rqt_graph能够创建一个显示当前系统运行情况的动态图形。ROS 分布式系统中不同进程需要进行数据交互,计算图可以以点对点的网络形式表现数据交互过程。rqt_graph是rqt程序包中的一部分。
2.计算图安装
如果前期把所有的功能包(package)都已经安装完成,则直接在终端窗口中输入
rosrun rqt_graph rqt_graph
如果未安装则在终端(terminal)中输入
$ sudo apt install ros-<distro>-rqt
$ sudo apt install ros-<distro>-rqt-common-plugins
请使用你的ROS版本名称(比如:kinetic、melodic、Noetic等)来替换掉<distro>。
例如当前版本是 Noetic,就在终端窗口中输入
$ sudo apt install ros-noetic-rqt
$ sudo apt install ros-noetic-rqt-common-plugins
3.计算图演示
接下来以 ROS 内置的小乌龟案例来演示计算图
首先,按照前面所示,运行案例
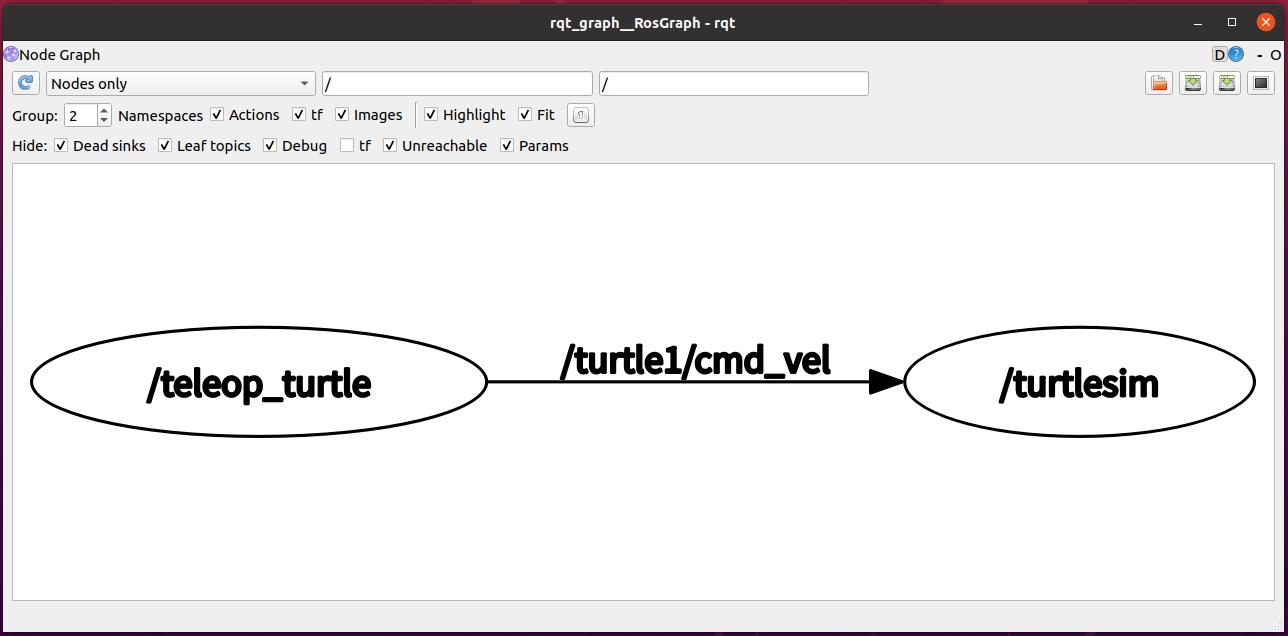
然后,启动新终端,键入: rqt_graph 或 rosrun rqt_graph rqt_graph,可以看到类似下图的网络拓扑图,该图可以显示不同节点之间的关系。