9.3 深度图像转激光数据
实体机器人深度图像转换成激光数据实现与仿真环境类似。
1.launch文件
launch 文件示例如下:
<launch>
<param name="/use_sim_time" value="false" />
<node pkg="depthimage_to_laserscan" type="depthimage_to_laserscan" name="depthimage_to_laserscan">
<remap from="image" to="/camera/depth/image_raw" />
<param name="output_frame_id" value="camera_link" />
</node>
</launch>
需要注意 output_frame_id 的设置,需要与深度相机的 frame_id 一致,我们使用的硬件,默认是 camera_link。
2.执行
1.PC端,启动roscore;
2.机器人端,ssh远程登陆机器人后,只需要启动深度相机节点即可(不要启动激光雷达):
roslaunch astra_camera astra.launch
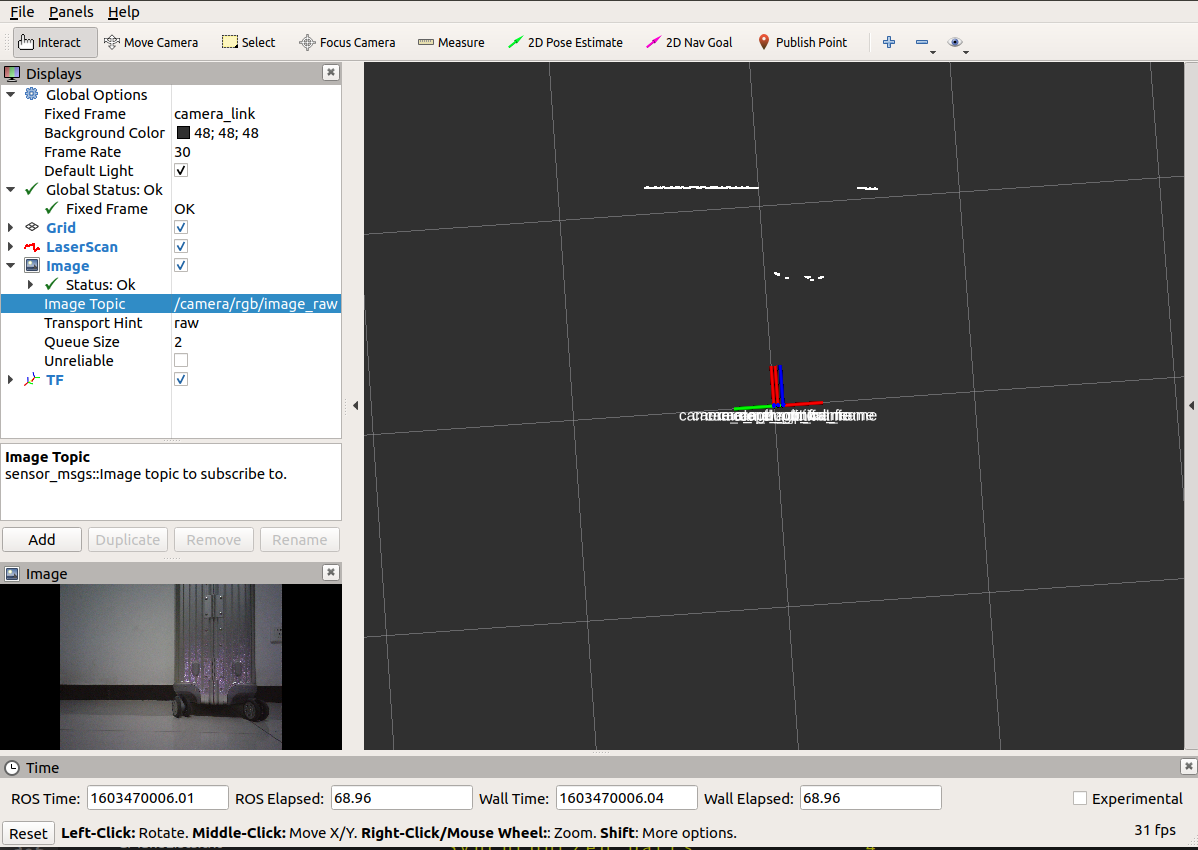
3.PC端,执行转换节点launch文件;
4.PC端,启动 rviz 查看执行结果。